Configuration
Platforms and sensors
To work with live video streams, you must first configure them. In general, the server works with a logical entity called a Platform, such as a plane, drone, or car, that can carry multiple Sensors (video cameras) or other data sources. The operator uses the platforms.yml file to define the existing platforms and network topology.
When you record the streams, they become a mission, which includes live feeds, recordings, and descriptive metadata. Until recording is active, it is simply a video feed, and the mission may or may not have started yet.

The StanagOnDemand server works with Stanag streams delivered over UDP multicast. If you have unicast source streams, you can use a stream recaster to convert them to multicast.
Basic platform configuration
The following example shows a configuration file that defines two UAV platforms, UAV_1 and UAV_2.
The first UAV has five sensors and data feeds:
- EO/IR sensor with the stream coming from udp://227.1.1.1:30120
- Tail camera sensor with the stream coming from udp://227.1.1.2:30122
- Operator screen capture sensor with the stream coming from udp://227.1.1.3:30123
- Radar capture sensor with the stream coming from udp://227.1.1.4:30124
Note that the Radar sensor has the active parameter set to
false(active: false), so the sensor is not monitored. Set it totrueto enable monitoring.
The second UAV has only one sensor:
- EO/IR sensor with the stream coming from udp://228.1.1.1:1234
If you have only one UAV (platform) to monitor, there should be only one platform in the list.
platforms:
# First platform
- name: UAV_1
active: true
description: First platform
type: Plane
sensors:
- name: EO/IR
description: EO/IR sensor
active: true
type: video
url: udp://227.1.1.1:30120
- name: Tail
description: Tail camera
active: true
type: video
url: udp://227.1.1.2:30122
- name: Operator
description: Operator screen
active: true
type: video
url: udp://227.1.1.3:30123
- name: AIS
description: AIS feed
active: true
type: ais
url: file://./aisdata/ais_data.nm4
- name: Radar
description: Radar
active: false
type: video
url: udp://227.1.1.4:30124
# Second platform
- name: UAV_2
active: true
description: Second platform
type: Plane
sensors:
- name: EO/IR
active: true
type: video
url: udp://228.1.1.1:1234
Note: If you need to select a specific network interface, add
?localaddr=to theurl:
udp://227.1.1.1:30120?localaddr=192.168.1.28
Allowed platform types:
- Plane
- Helicopter
- Quadcopter
- Camera
- ROV
- Diver
Configuring live video
The live video preview is provided by different services:
- Live preview:
stsupervisor - Live (WebRTC):
stanag2webrtc - DVR:
stserverorstvideo-server
Note: WebRTC requires a secure HTTPS connection to operate properly in browsers. Therefore, STServer must be deployed behind a reverse proxy configured with HTTPS, for example Nginx, when serving clients over the internet. This ensures secure signaling and media transport setup. The only exceptions are when STServer is accessed from localhost or within a trusted local network, where HTTP connections are also permitted. In all other cases, HTTPS must be enforced for compatibility and security.
stanag2webrtc service in docker-compose.yml
stanag2webrtc:
image: impleo/stanag2webrtc:3.0.1
container_name: stanag2webrtc
restart: always
network_mode: host
volumes:
- ./data/:/app/data/
environment:
ADDR: 0.0.0.0:8081
WEBRTC_SERVICE: "stanag2webrtcwhep"
# WEBRTC_LOOPBACK_ICE_CANDIDATE: true # Use loopback ICE candidate (if local access is required). If true, the server will use a loopback ICE candidate
# WEBRTC_FULL_ICE: true # If true, the server will use full ICE (not ICE-Lite) for WebRTC connections
KLV_SAMPLING: 300
More on stanag2webrtc service configuration
You can override the default parameters for each channel by adding a live section to the sensor configuration. For example, if you have a video stream that can be played directly in the browser using the H.264 codec, it is recommended to enable video pass-through by setting the videoPassthrough parameter to true. This preserves the original video quality and minimizes CPU usage.
# Platforms
platforms:
# First platform
- name: UAV_1
active: true
description: First platform
type: Plane
sensors:
- name: EO
description: EO/IR sensor
active: true
type: video
url: udp://227.1.1.1:30120
live:
videoPassthrough: true
Alternatively, if you want to set a specific video bitrate, resolution, and codec, you can use the videoResolution, videoBitrate, and videoCodec parameters.
# Platforms
platforms:
# First platform
- name: UAV_1
active: true
description: First platform
type: Plane
sensors:
- name: EO
description: EO/IR sensor
active: true
type: video
url: udp://227.1.1.1:30120
live:
streams:
- id: main # layer name (used as Simulcast-Layer)
codec: vp8 # h264 / h265 / vp8 / vp9 /
resolution:
width: 1280
height: 720
framerate: 30
bitrate: 2000
Logging
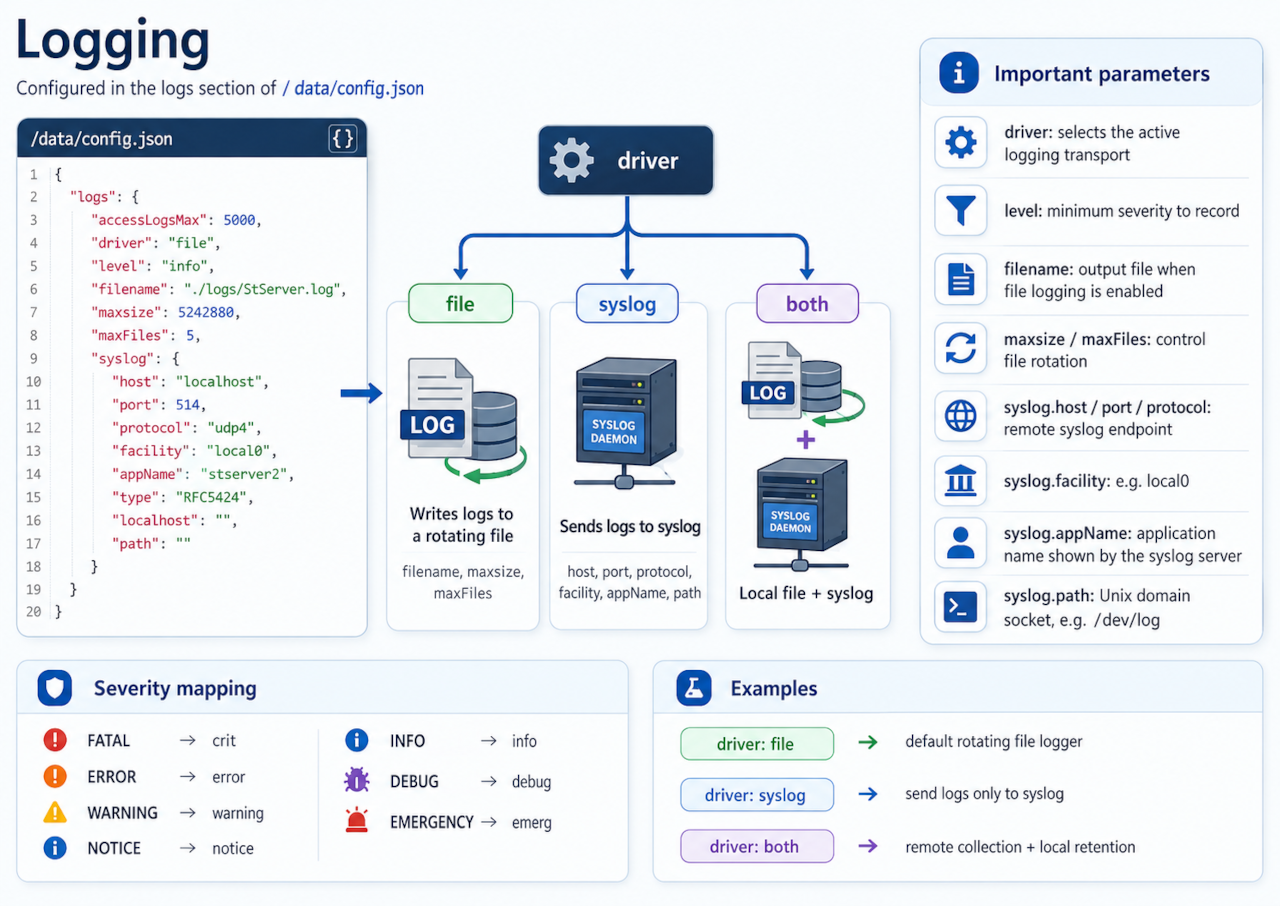
Logging is configured in the logs section of /data/config.json.
"logs": {
"accessLogsMax": 5000,
"driver": "file",
"level": "info",
"filename": "./logs/StServer.log",
"maxsize": 5242880,
"maxFiles": 5,
"syslog": {
"host": "localhost",
"port": 514,
"protocol": "udp4",
"facility": "local0",
"appName": "stserver2",
"type": "RFC5424",
"localhost": "",
"path": ""
}
}
Supported logging drivers:
filewrites logs to the rotating file configured byfilename,maxsize, andmaxFilessyslogsends logs to a syslog daemon or log collectorbothwrites to the local file and sends the same messages to syslog
Important parameters:
driverselects the active logging transportleveldefines the minimum log severity to recordfilenameis the output file used when file logging is enabledmaxsizeandmaxFilescontrol file rotationsyslog.host,syslog.port, andsyslog.protocoldefine the remote syslog endpointsyslog.facilitysets the syslog facility, for examplelocal0syslog.appNamecontrols the application name shown by the syslog serversyslog.pathcan be used for Unix domain socket logging such as/dev/log
Supported severity categories:
FATALmaps to syslogcritERRORmaps to syslogerrorWARNINGmaps to syslogwarningNOTICEmaps to syslognoticeINFOmaps to sysloginfoDEBUGmaps to syslogdebugEMERGENCYmaps to syslogemerg
Examples:
- Keep the default rotating file logger with
"driver": "file" - Send logs only to syslog with
"driver": "syslog" - Use
"driver": "both"when you want remote collection and local retention at the same time
For a quick syslog test, point syslog.host and syslog.port to a local listener such as nc -klu 5514, set driver to syslog, and then start the server or emit a few log messages through the application logger.